GPS driver behavior
Here, you can adjust the GPS driving behavior parameters of Topflytech’s objects.
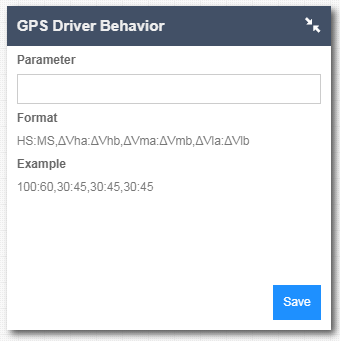
GPS driving behavior detection is divided into detecting high speed, medium speed, and rapid acceleration and rapid deceleration at low speed. If the above behavior occurs, several data upload servers will be generated to detect this behavior.
HS: MS, ΔVha: ΔVhb, ΔVma: ΔVmb, ΔVla: ΔVlb. among them:
- HS: MS. The configuration conditions are high speed, medium speed and low speed. More than HS is high speed, less than MS is low speed, and between HS and MS is medium speed.
- ΔVha: ΔVhb, configured with the value of sudden braking and rapid acceleration at high speed. Once this value is exceeded, alarm data is generated. Where ΔVha is the value of the rapid acceleration, and ΔVhb is the value of the sudden deceleration. In the target system, this value refers to the amount of change in speed within 5 seconds.
- ΔVma: ΔVmb, configured with the value of sudden braking and rapid acceleration at medium speed. Once this value is exceeded, alarm data is generated. Where ΔVma is the value of the rapid acceleration, and ΔVmb is the value of the sudden deceleration. In the system of the object, this value refers to the amount of change in speed within 5 seconds.